

İçindekiler
- 01. Kısa Özet
- 02. Performansı belirleyen 6 ana değişken
- 03. Havuz geometrisi: robotun kapsama sınırları
- 04. Zemin/duvar kaplaması: tutuş (grip) faktörü
- 05. Kirlilik tipi: yaprak, kum, yosun ve biyofilm
- 06. Filtre ve sepet: doluluk, by-pass ve verim
- 07. Hidrolik denge: sirkülasyon ve “ölü bölgeler”
- 08. Kullanım disiplini: bakım, başlatma noktası, kablo yönetimi
- 09. Performans sorunu teşhis akışı
- 10. Havuz tipine göre robot seçimi
- 11. SSS
Kısa Özet
Havuz temizleme robotu performansı her havuzda aynı olmaz çünkü robotlar sabit algoritmalarla çalışır ve havuzdan gelen fiziksel geri bildirimlere (geometri, yüzey tutuşu, kirlilik yoğunluğu, filtre doluluğu, su akışı ve kullanıcı alışkanlıkları) göre farklı davranır. Aynı robot; düz taban–seramik yüzey–dengeli sirkülasyon bulunan havuzda yüksek kapsama sağlarken, eğimli taban–kaygan kaplama–yoğun yaprak/kum–ölü sirkülasyon olan havuzda kapsama ve toplama verimi düşebilir.
- Geometri: Keskin köşeler, ani eğimler kapsama oranını düşürür.
- Yüzey: Kaygan liner/cam mozaik duvara tırmanmayı zorlaştırır.
- Kirlilik: Yaprak–kum–yosun farklı donanım (filtre/fırça) ister.
- Filtre: Dolan filtre emişi düşürür, “temizlemiyor” algısı yaratır.
- Hidrolik: Ölü bölgeler kir biriktirir; robot dağıtıyor sanılır.
- Kullanım: Filtre bakımı, başlatma noktası ve kablo yönetimi sonucu belirler.
Performansı Belirleyen 6 Ana Değişken
1) Havuz geometrisi
Taban formu, derinlik geçişleri, basamaklar ve dar bölgeler robotun rota stabilitesini belirler.
2) Zemin & duvar kaplaması
Grip (tutuş) düşükse robot kayar; duvar tırmanma ve hat üzerinde ilerleme zayıflar.
3) Kirlilik tipi
Yaprak/çam iğnesi, kum/toz ve yosun/biyofilm farklı filtre ve fırça davranışı ister.
4) Filtre & sepet yapısı
Filtre doluluğu emişi düşürür; gözenek seçimi kirin kaçmasına veya hızlı tıkanmaya yol açar.
5) Hidrolik denge
Geri dönüş nozulları ve emiş noktaları kirin nerede birikeceğini belirler.
6) Kullanım disiplini
Robotu doğru başlatmak, filtreyi doğru zamanda temizlemek ve kabloyu yönetmek sonucu değiştirir.
1) Havuz Geometrisi: Robotun Kapsama Sınırları
Havuz Robotlarının büyük kısmı “harita çıkarıp plan yapan” cihazlar gibi pazarlansa da, sahada sonuç genellikle şuna dayanır: Havuz Temizleme Robotu, sensörlerinden aldığı temas–direnç–eğim verilerine göre yön değiştirir. Bu yüzden havuz geometrisi karmaşıklaştıkça aynı robotun kapsama oranı düşebilir.
Geometri performansı nasıl bozar?
- Ani eğimler → çekiş kaybı + rota sapması
- Keskin köşeler → sık sık “geri kaçma” ve aynı bölgede oyalanma
- Basamak / oturma alanı → takılma veya alanı atlama
- Dar koridorlar → manevra kaybı, kablo dolanması (kablolu modeller)

algoritmasını zorlayarak kapsama oranını düşürebilir.
Pratik saha testi
- Havuz Robotu 1 çevrim çalıştır, hangi bölgeleri tekrar tekrar temizlediğini işaretle.
- Aynı çevrimi havuz temizlik robotu farklı bir başlangıç noktasından başlatarak tekrarla.
- “Israrla kaçırılan” bölge aynı kalıyorsa sorun çoğunlukla geometri/akış kaynaklıdır.
2) Zemin & Duvar Kaplaması: Tutuş (Grip) Faktörü
Duvara tırmanma ve zeminde stabil ilerleme için robotun tahrik sistemi (palet/teker) ve fırça yapısı kadar, havuz yüzeyinin sürtünme katsayısı da kritiktir.
Tutuş; havuz robotları tırmanma yüzdesini, dönüşlerde kaymayı ve “çizgi atlama” riskini belirler. Özellikle biyofilm oluştuğunda kaplama aynı kalsa bile sürtünme davranışı değişir.
Düz / Kaygan yüzey (liner, parlak seramik)
- Duvara çıkış azalabilir; dönüşlerde “spin” artar.
- Su hattı temizliği zayıflar (özellikle biyofilm varsa).
- Çözüm: palet/teker tutuşu yüksek model + biyofilm kontrolü.
Orta doku (mat seramik, mozaik)
- Stabil sürüş + iyi tırmanma dengesi.
- Fırça teması daha tutarlı → kapsama verimi yükselir.
- Genelde “ideal senaryo”.
Pürüzlü kaplama (sıva/agrega)
- Tutuş yüksek; fakat sürtünme artar → hız düşebilir.
- İnce toz dokuya gömülür → filtre yükü artar.
- Çözüm: güçlü motor + doğru filtre inceliği + düzenli bakım.
30 Saniyelik Grip Kontrolü
3) Kirlilik Tipi: Yaprak, Kum, Yosun ve Biyofilm
“Havuz Robotum temizlemiyor” şikâyetinin en sık nedeni, havuzdaki kirin havuz temizleme robotunun filtre/fırça mimarisine uymamasıdır. Aynı havuz robotu; yaprakta mükemmelken ince tozda ortalama, yosunda ise zayıf görünebilir (veya tersi).
Aynı havuz temizleme robotunun farklı havuzlarda farklı görünmesinin en pratik nedeni “kirin fiziği”dir: yaprak hacim ister, kum filtrasyon ister, yosun/biyofilm temas ister.
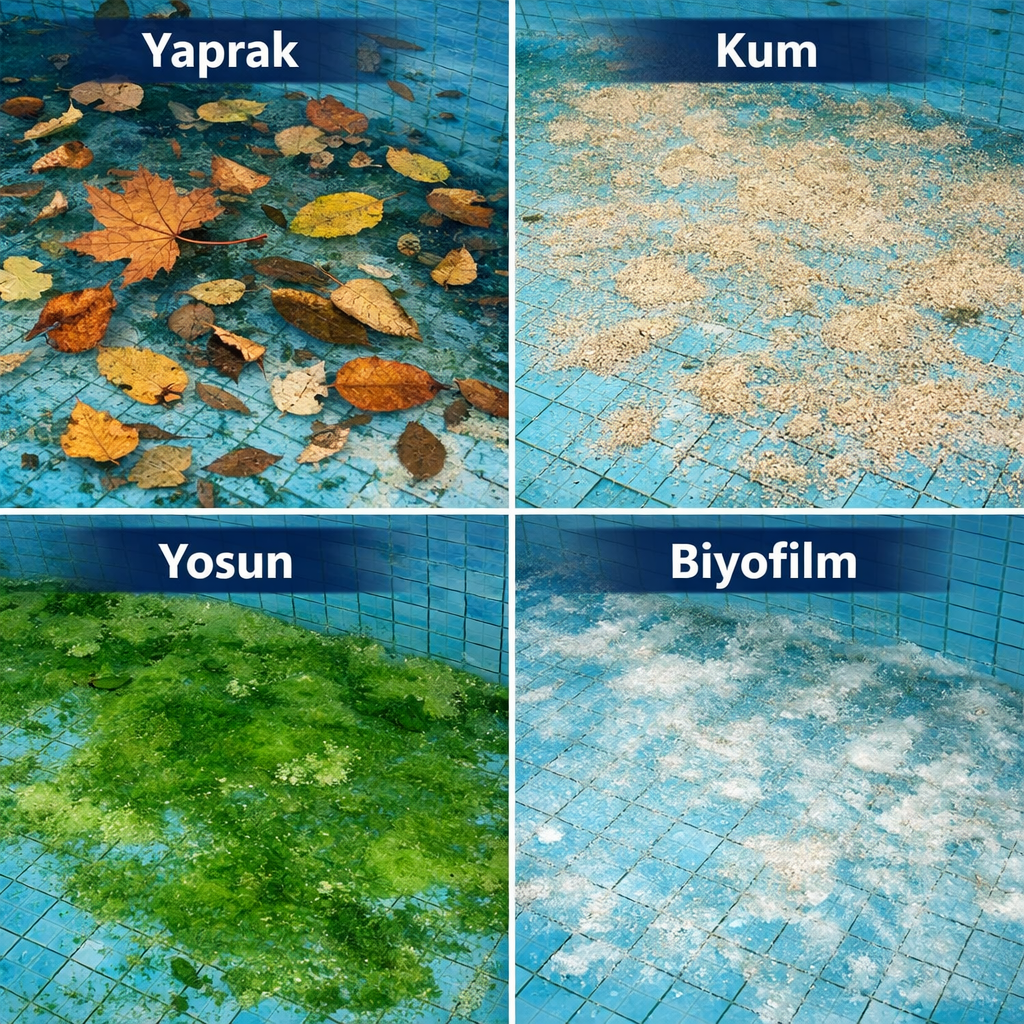
Yaprak / kaba kir
- Hazne çabuk dolar → çevrim başına verim düşer.
- Geniş emiş ağzı + yüksek hacimli sepet avantaj.
- Ön skimmer temizliği/ön süpürme fark yaratır.
Kum / ince toz
- Yanlış gözenek → toz geri kaçabilir veya hızlı tıkanma olur.
- “Dipte film kalıyor” şikâyeti tipiktir.
- Filtreyi daha sık temizlemek gerekir.
Yosun / biyofilm
- Kaygan tabaka tutuşu düşürür; kir tekrar hızlı döner.
- Robot tek başına kök nedeni çözmez (su dengesi şart).
- Ön fırçalama + dezenfeksiyon sonrası robot destekleyici olur.
| Kİr türü | Tİpİk senaryo | krİtİk özellİk | Saha önerİsİ |
|---|---|---|---|
| Yaprak / çam iğnesi | Ağaçlı bahçe, rüzgâr | Geniş emiş ağzı, yüksek taşıma hacmi | Skimmer filesi + kaba ön temizlik verimi artırır |
| Kum / ince toz | Beton çevre, rüzgâr tozu | Hassas filtre, iyi sızdırmaz gövde | Filtreyi sık temizle; tıkanma emişi düşürür |
| Yosun / biyofilm | Yetersiz dezenfeksiyon | Sert/etkin fırça, yüzeye basınç | Önce su dengesini düzelt; robot tek başına çözüm değildir |
Yanlış filtre = yanlış performans yorumu
İnce filtre “daha iyi temizlik” gibi görünse de her koşulda avantaj değildir. İnce tozda idealdir; ama yoğun kirde çabuk dolar, emiş düşer ve havuz robotu aynı turda daha az kir toplar. Kaba filtre ise yaprakta avantajlıdır; fakat tozu kaçırabilir.
4) Filtre & Sepet: Doluluk, By-pass ve Gerçek Verim
Havuz Temizleme Robotlarında filtre haznesi doldukça su akışı azalır. Su akışı azalınca emiş düşer; emiş düşünce havuz robotu “temizlemiyor” gibi görünür. Bu etki özellikle ince toz ve yosun kalıntısı olan havuzlarda daha belirgindir.
Filtre doldukça debi düşer → emiş azalır → robot kirin üstünden geçip “toplamıyor” gibi görünür. Ayrıca sepet/filtre oturması zayıfsa by-pass ile kir geri kaçabilir.

Hızlı Teşhis: “2 Çevrim” + By-pass Kontrolü
İnce filtre
- İnce tozda iyi; yoğun kirde hızlı tıkanabilir.
- Tıkandığında emiş düşer → “temizlemiyor” algısı.
Kaba filtre
- Yaprakta iyi; ince tozu kaçırabilir.
- Hızlı dolmaz ama “film” şikâyeti yaratabilir.
Gerçek verim
- Verim = toplama + tutma + kaçırmama (by-pass yok).
- Filtre oturuşu/sızdırmazlık en az gözenek kadar kritik.
Filtre doluluğunun 3 tip belirtisi
- Havuz Robotu daha yavaş ilerler veya aynı bölgede oyalanır.
- Havuz Temizleme Robotu çıktıktan sonra dipte “ince film” kalır.
- Filtre çıkarıldığında su, tazyiksiz akar veya filtre yüzeyi çamur gibi kaplanmıştır.
Hızlı uygulama: “2 çevrim testi”
- Havuz Robotu 1 çevrim çalıştır, filtreyi çıkar ve temizle.
- Aynı gün 2. çevrimi çalıştır.
- 2. çevrimde performans belirgin yükseliyorsa ana sorun filtre doluluğudur.
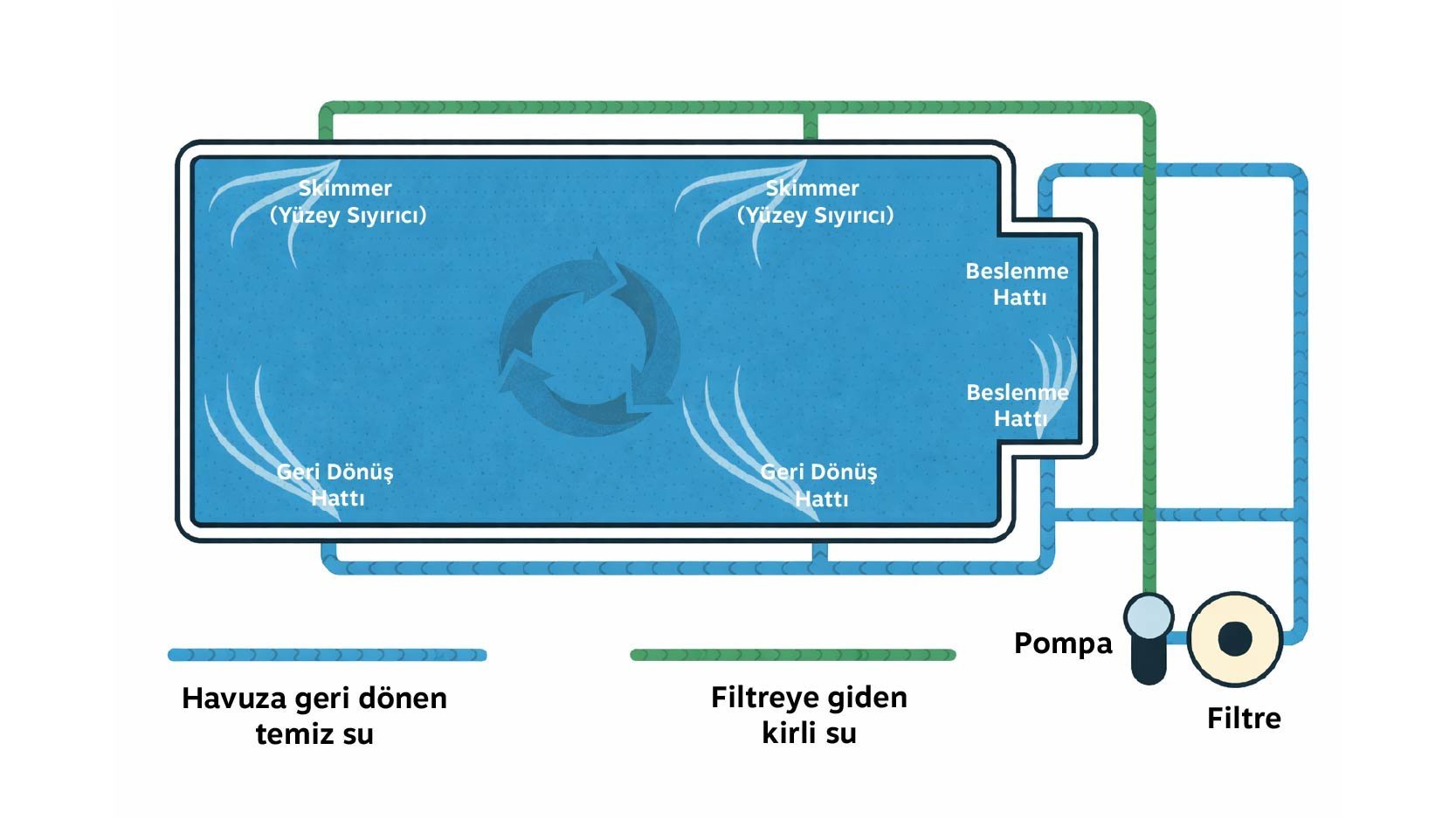
5) Hidrolik Denge: Sirkülasyon ve “Ölü Bölgeler”
Havuz içi su akışı (sirkülasyon), kirin hangi bölgede toplanacağını belirler. Eğer havuzda ölü bölgeler varsa kir sürekli aynı alana birikir. Havuz Temizlik Robotları o bölgeyi temizlese bile kısa sürede yeniden kirlenir ve kullanıcı “havuz robotu dağıtıyor” diye yorumlayabilir.
Ölü bölge nedir?
Geri dönüş nozullarının suyu yeterince çevirmediği, akışın zayıf kaldığı alanlardır.
Nasıl anlaşılır?
Dipte kir hep aynı yerde birikiyorsa veya yüzeyde yüzen parçacıklar aynı köşede toplanıyorsa ölü bölge vardır.
6) Kullanım Disiplini: Bakım, Başlatma Noktası ve Kablo Yönetimi
Saha gözlemi: Performans şikâyetlerinin büyük bölümü kullanım rutini ile ilgilidir. Aynı havuz robotu, doğru alışkanlıklarla çok daha stabil sonuç verir.
En sık yapılan hatalar
- Filtreyi geç temizlemek: Emiş düşer, tur başına toplanan kir azalır.
- Havuz Robotlarını her seferinde aynı noktadan başlatmak: Rota önyargısı oluşur; bazı bölgeler daha az ziyaret edilir.
- Kabloyu açmadan suya bırakmak (kablolu modeller): Dolanma artar, hareket alanı kısıtlanır.
- Aşırı kirli havuzda ön temizlik yapmamak: Robot bir çevrimde doygunluğa ulaşır.
Standart rutin (kısa ve etkili)
- Her çevrim sonrası filtre/sepet kontrolü.
- Her 2–3 çevrimde bir fırça/palet kontrolü (kir–saç birikimi varsa temizle).
- Başlatma noktasını sırayla değiştir (A köşesi → B köşesi → derin taraf).
- Kabloyu düz aç, suya “kat yapmadan” bırak (kablolu modeller).
Performans Sorunu Teşhis Akışı
Filtre doluluğunu kontrol et
Filtreyi temizleyip aynı gün tekrar dene. İyileşme varsa ana sorun doluluk/filtre seçimi.
Kirlilik tipini tanımla
Yaprak mı, kum mu, yosun mu? Robotun filtre/fırça mimarisi buna uygun mu?
Geometri kaynaklı “kör nokta” testi yap
Farklı başlangıç noktasından 1 çevrim. Aynı bölgeler sürekli kaçıyorsa geometri/hidrolik şüphesi artar.
Yüzey tutuşunu değerlendir
Kaygan yüzey + biyofilm varsa duvar tırmanma azalabilir. Yüzey/su dengesi kontrol edilir.
Hidrolik “ölü bölge” kontrolü
Kir hep aynı yerde toplanıyorsa nozul yönleri ve sirkülasyon düzeni gözden geçirilir.
Mekanik kontrol (son adım)
Fırça/palet aşınması, pervane tıkanması, sızdırmazlık ve motor performansı kontrol edilir.
Havuz Tipine Göre Robot Seçimi
| Havuz & çevre | Tİpİk sorun | Öncelİklİ özellİk | Not |
|---|---|---|---|
| Düz taban, sade form | Kapsama genelde iyi | Standart navigasyon + iyi filtre | Filtre bakımı çoğu sorunu çözer |
| Ani eğim / derinlik geçişi | Rota sapması, tutuş kaybı | Yüksek tork, güçlü palet | Başlatma noktası değişimi fayda sağlar |
| Liner / kaygan yüzey | Duvara çıkmama | Grip odaklı palet + uygun fırça | Yüzeyde biyofilm kontrol edilmeli |
| Ağaçlı çevre (yaprak) | Hazne çabuk dolar | Geniş ağız + yüksek hacimli sepet | Ön temizlik + skimmer filesi önerilir |
| İnce toz / kum ağırlık | Dipte film kalması | Hassas filtre + iyi sızdırmazlık | Filtreyi sık temizlemek gerekir |
| Yosun / biyofilm riski | Kayganlık, tutuş ve kir tekrarı | Sert fırça + su kimyası kontrolü | Robot tek başına çözüm değildir |
